Home About us Contact us Protuner Loop Analyser & Tuner Educational PDFs Loop Signatures Case Histories
Michael Brown Control Engineering CC
Practical Process Control Training & Loop Optimisation
CASE HISTORY 194
BOILER LEVEL CONTROL PROBLEM
A boiler level control in a petro-chemical refinery was causing problems as the level was cycling badly, and taking a long time to recover from sudden load changes. In addition there were frequent high level alarms.
As explained in previous articles level processes nearly always fall into the “integrating” class of processes where one has to get the input and output of the process to be equal so that the PV (process variable) remains constant. This is also known as a “balancing process”, and the value of the PD (controller output) when balance has been achieved, is known as “the balance point”. If a step change is then made on the PD the PV level will move either up or down, generally at a constant ramp rate, which is why the process is referred to as integrating. If no other changes are made, and if no load changes occur, the vessel will eventually either overflow or run empty. This is why it is very important to control these processes in automatic so they cannot “run away”. If one was to control them in manual, it would require the constant attention of an operator to prevent such a runaway.
Figure 1
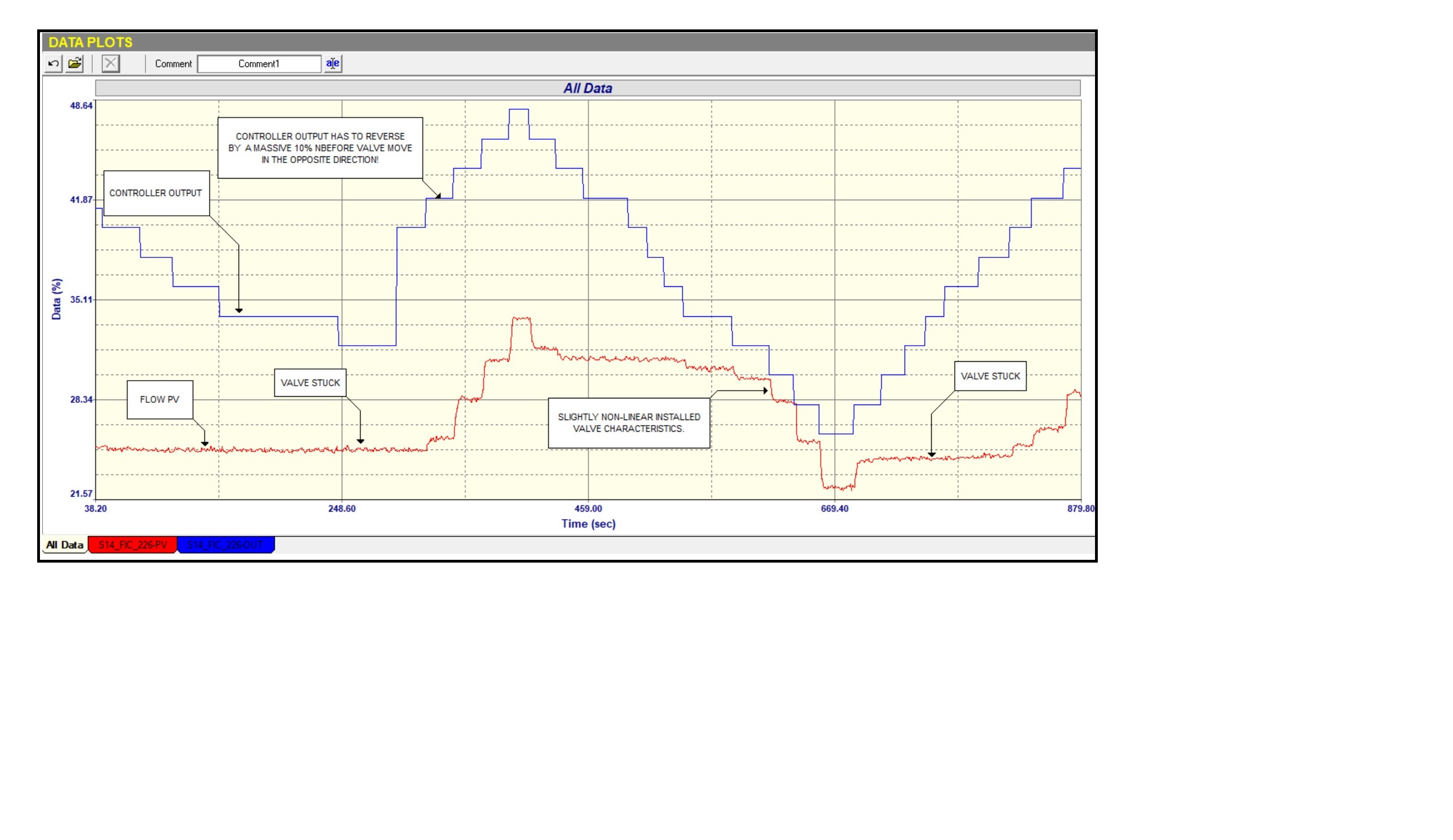
Tests were conducted on the control. Figure 1 shows a section of the open loop test where the controller was placed in manual, and step changes were made on the PD.
In the figure, and ignoring the high frequency fluctuations, it can be seen that the PD was initially at the balance point as the level PV was constant. The PD was the stepped down by about 10% and the level then started moving down in a constant ramp. This behaviour is normal for a level process. However if we go back to the high frequency fluctuations, it was seen that as the level dropped these got smaller in amplitude, and then stopped completely.
What was causing these fluctuations at the higher levels? This is something that could not be determined at the time of the test as we could not easily access the boiler to try and determine the cause. However it was pretty obvious that these where the reason causing the alarms.
In the interim it was decided to control the level at a lower point where the signal was smoother.
Figure 2
As mentioned above the operators had complained that the level was cycling badly. Now the question was were they considering the high frequency fluctuations as cycling? We will discuss this in more detail:
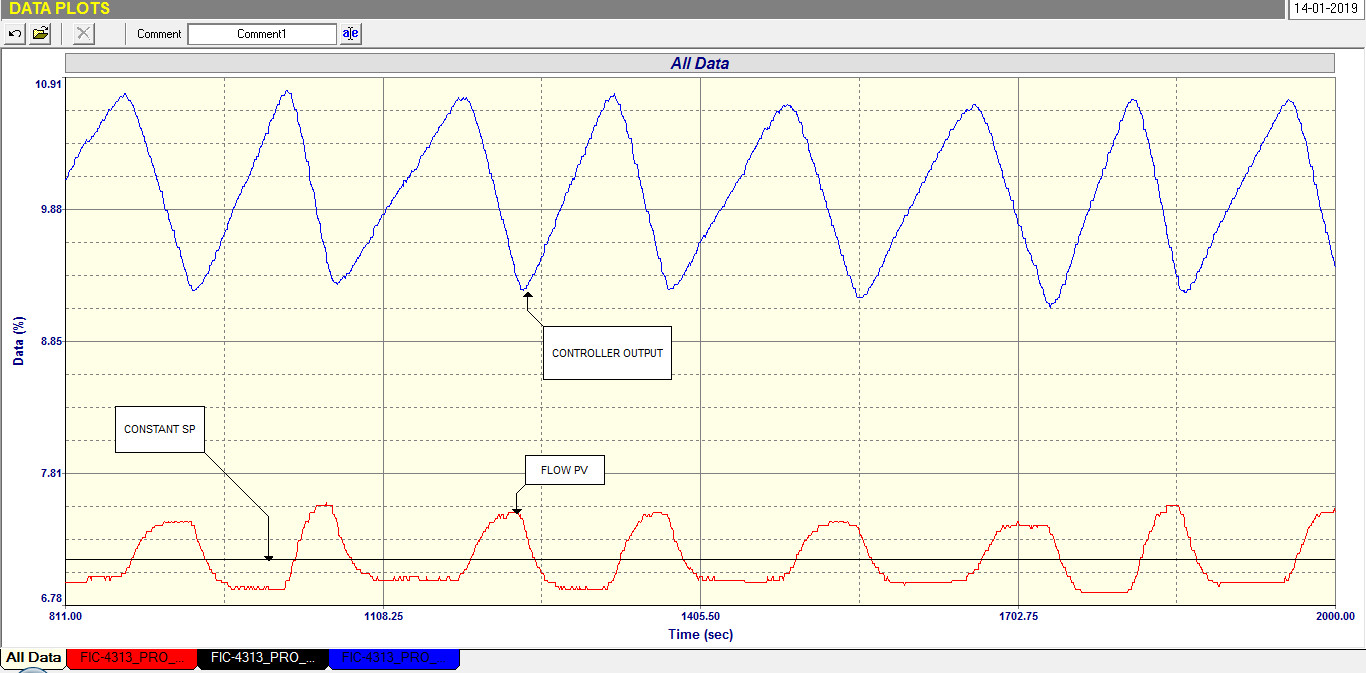
Figure 2 shows a closed loop test (controller in automatic) with the first half of the test being the control response with the “as-found” tuning, and the second half of the test with the new tuning which was calculated from the open loop test. (This will be discussed later).
At the start of the test the controller had been in manual and the level PV was ramping up to 100%. The PD was dropped down by about 10% and then the controller was placed into automatic with the SP at 71%. The response of the loop was very interesting. Please note that the “as-found” tuning was P = 0.7, and I = 4.0 minutes/repeat.
The following things could be observed on the first half of the test:
1. The control response was very slow, as the proportional gain far too low, and the integral having to do most of the work. This is very typical of the type of tuning we often find in integrating processes where the practitioners have little understanding of the characteristics of integrating processes, and how to tune them. They often end up with too low a gain and far too fast an integral, a combination that can easily lead to slow control and instability.
2. The high frequency fluctuations were of large amplitude when the level was at the top of the vessel and then they started disappearing as the level came down below 8%, and were virtually completely gone when the level reached 75%.
3. A much lower frequency cycling, almost sinusoidal in nature, and of higher amplitude than the high frequency fluctuations, could also be seen in various places on the response as the level came down to SP.
What was going on?
Well firstly random relatively high frequency variations around a mean level are often seen in PV signals. We define this as “noise”. It can be caused by disturbances in the process itself or by the measuring method, as was probable in this case. Typically noise in flows may be caused by turbulence and in tank levels by ripples and disturbances on the surface of the liquid in the tank. The high frequency fluctuations seen in the test definitely fall into the noise category.
I have written many articles about noise and its effects on processes. Contrary to popular belief it generally has very little deleterious effects on the actual control, but it can make the PV signal look awful. Unfortunately with the advent of digital control systems it is very easy to apply filters so that the noise cannot be seen on the PV signals on the operators’ consoles. However, and most unfortunately, filtering can itself have adverse effects on the quality of control. (The reasons for this are outside the scope of this article).
C&I personnel often ruthlessly suppress the noise by applying filters, and these days operators are not used to seeing it. When one removes filters the operators then generally mistake the noise for control instability, and often get very unhappy. It often needs quite a lot of discussion and persuasion to get them used to controlling with noisy PV signals on their displays.
On the other hand the slow cycles seen in the test were definitely caused by instability. Instability in integrating processes is normally evidenced by quite low frequency cycling as can be seen here. The reason for the instability in this case was almost certainly was due to the poor as-found tuning in the controller.
The new tuning was P = 4.0, and I = 38.0 minutes/repeat. It can be seen in the second half of the closed loop test shown in Figure 2 as to how well the PV responded to a step in SP.
Figure 3
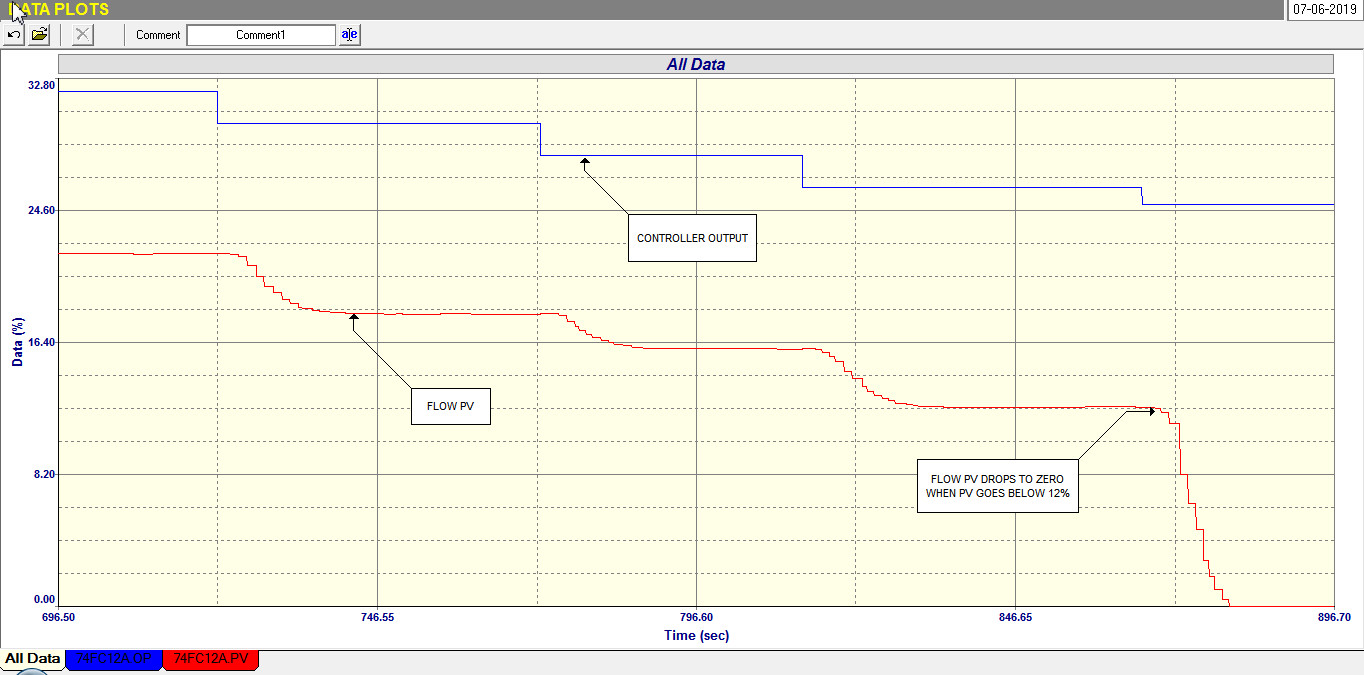
Figure 3 shows the loop’s control performance after the optimisation in a closed loop test recorded for over 15 hours. The SP was kept constant, but one can see how well the control responded to fairly significant load changes that occurred during this period. This is evidenced by the movements of the PD which was working quite hard to keep the PV on SP.
Also in this test one can see that there is a small level of noise on the unfiltered PV. This noise appears much bigger on the PD signal which is because it is amplified by the proportional gain of 4. C&I personnel often mistakenly get worried about seeing this as they think the valve will be adversely affected. However one must remember that pneumatically operated valves have a lot of natural damping in them as there are relatively large air volume in their actuators, and the noise frequencies on the PD signal are generally far too high to affect the valve. I always advise people who are concerned to actually go out into the field and put a finger on the actuator stem, so they can be assured the valve is not in fact jumping around.