Home About us Contact us Protuner Loop Analyser & Tuner Educational PDFs Loop Signatures Case Histories
Michael Brown Control Engineering CC
Practical Process Control Training & Loop Optimisation
LOOP SIGNATURE 30
NON LINEARITY IN CONTROL LOOPS - PART 1
Non-linearity in a control loop can be broadly defined as a change or changes in the process dynamics in the loop. If this occurs it means that if one is to carry on controlling with the same response to changes in load or setpoint, then the tuning of the controller will also need to be adjusted to meet the new conditions.
Non-linearity can arise from various causes. One of these was covered in Loop Signature article No. 6, where it was shown how important it could be to have linear installed characteristics in your final control element. To summarise this, non-linear installed characteristics cause changes in process gain as the process moves over the measuring range.
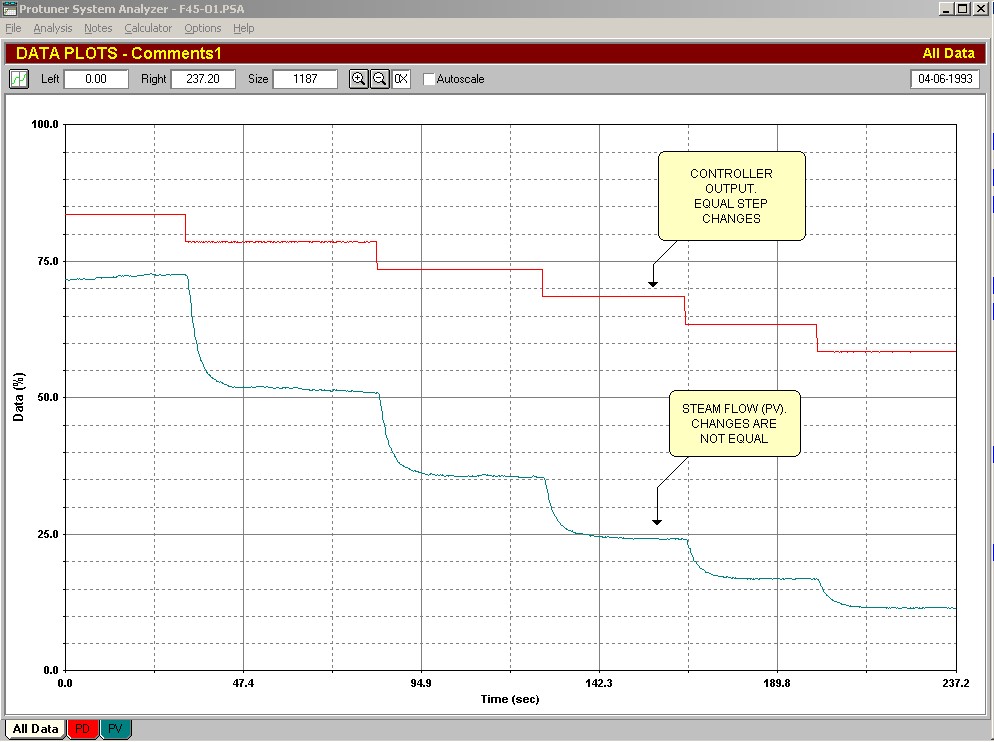
The product of process gain times controller gain (PG x KP) is the main factor that contributes to a controller response to a setpoint or load change. Thus the response will change if the process gain changes. This is illustrated in Figure 1, which shows part of an open loop test on a steam flow loop in a large South African petro-chemical refinery. As the output of the controller is decreased in equal increments the steam flow decreases in steps getting smaller and smaller. It is a good example of a non-linear installed characteristic.
Figure 1
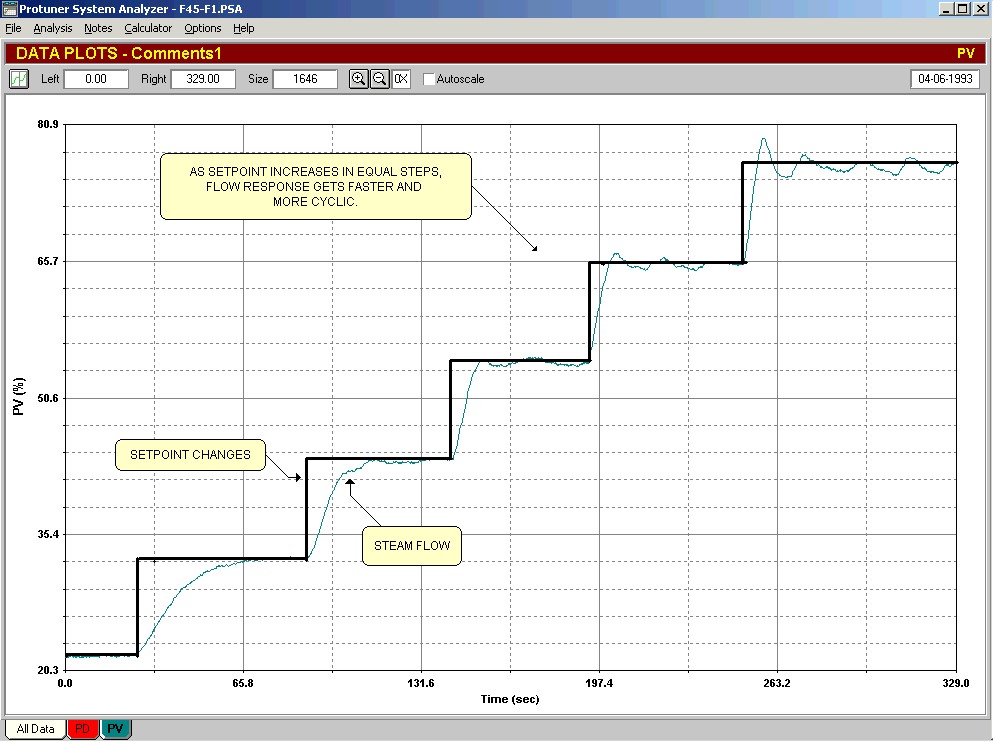
Figure 2
The loop was then tuned using the second last step, and then placed in automatic. Figure 2 shows the closed loop test where the setpoint is being increased in equal steps. It can be seen that on the lowest step the response is very sluggish, and as the setpoint is increase it gets faster and faster, until on the last step, the loop is starting to go unstable, and is very close to going into an ultimate cycle.
There are many factors as to why non-linearities may be present in a control loop, and it is sometimes useful to remind oneself about these. Often in our courses we ask delegates to try and list these and then to suggest solutions to them. The following are some:
Non-linear installed valve characteristics.
This is discussed above. There are various possible solutions:
a) Tune in the area of highest process gain and accept sluggish response in areas where the process gain is smaller.
b) Use gain scheduling (sometimes referred to as adaptive tuning), i.e. change the tuning via a look-up table to give optimum response as the process gain changes.
c) Linearise the characteristics by changing the valve trim.
d) Many of the older positioners were supplied with a variety of cams to allow one to change the characteristics by changing the cam. Alternatively one could machine a cam especially to linearise the loop.
e) Many of the modern smart positioners offer various characteristic curves in their software, or one can write a special curve via a polynomial or in a look-up table to do the job.
f) It should also be realised that many loops do little work and are really there to deal only with small load changes. These loops do not operate over a wide range. In these cases it may not be necessary at all to try and linearise them.
Oversized characterised valve
(Valve characteristics were also discussed in Loop Signature 6, mentioned above).
A valve with non-linear inherent characteristics like equal percentage is designed to provide linear installed characteristics in the correct applications (e.g. where the differential pressure across the valve decreases with increasing load) over the full range of the valve. Therefore if the valve is largely oversized, there is a good chance that the installed characteristics will not be linear.
If such installed non-linearity is encountered, then solutions would be similar to those mentioned above.
Dynamic non-linearity.
(A detailed discussion on hysteresis was given in Loop Signature 7).
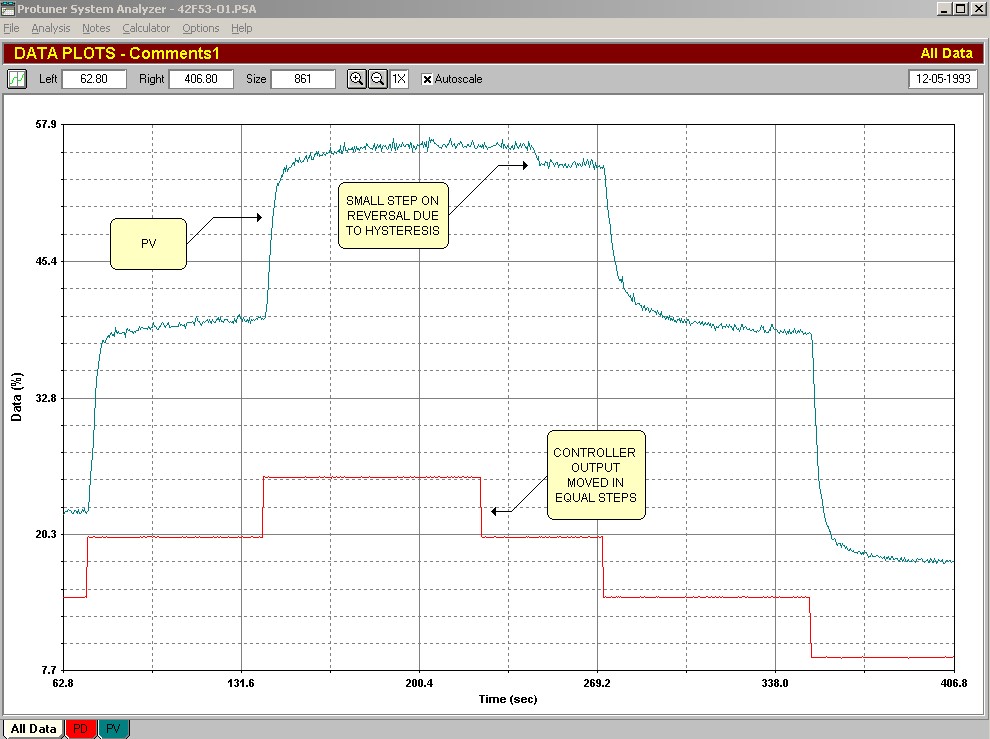
Dynamic non-linearity will occur when there is hysteresis in the valve. Every time the valve is reversed the output of the controller has to move a certain amount (equal to the hysteresis) before the valve actually starts moving. Thus on open loop step tests, the PV will move a smaller amount on the first step after a reversal, than on subsequent steps.
A case like this is illustrated in Figure 3.
Figure 3
This is often the reason that bad tuning is obtained from many of the tuning systems available on the market. Many of them make a single step and then tune on this response. If it is the first step after a valve reversal, and if the valve suffers from hysteresis, then the tuning may be way out.
To overcome a problem like this, always tune on a proper step where the valve is in fact moving properly.
Figure 4
Dynamic non-linearities can also be encountered in processes that respond differently to differing sizes of changes. For example I have encountered some very strange responses in certain cases of flows of high-density pulp in paper mills. The recording shown in Figure 4 was taken recently during a course at a tissue mill. Equal step changes on the process demand (PD) showed different responses at different places and also when the valve was moving in different directions. Initially one would suspect that the valve has severe problems. However after further tests on the plant it was decided that the valve was in fact operating properly, and that the strange and differing responses were being caused by consistency changes in the pulp when subjected to step changes. Making very small changes on the PD and using these for tuning resolved the problem. This is quite valid because in normal operation the flow is being kept constant, and the control is there to deal with load changes, which on the whole are very small.
The article will be concluded in the next issue of the Loop Signature series.