Home About us Contact us Protuner Loop Analyser & Tuner Educational PDFs Loop Signatures Case Histories
Michael Brown Control Engineering CC
Practical Process Control Training & Loop Optimisation
CONTROL LOOP CASE HISTORY 133
LIFE IS NEVER DULL FOR A CONTROL ENGINEER
Following from the last Case History article No 132 about interesting loops in a chemical plant where I do a lot
of optimisation, here are a few more examples of interesting loops.
The first two examples are of tuning of level control loops.
Level processes fall under the category of integrating, or ramping processes. There are numerous articles in
the first Loop Signature series where the subject of how to optimise integrating processes is covered
extensively. As mentioned there, this class of process is not at all well understood by the vast majority of
people who perform optimisation. Integrating processes for many reasons tend to be very cyclic if problems
like valve hysteresis exists and in particular with bad tuning. When it comes to tuning, integrating processes
are invariably tuned far worse than the other class of processes, known as self-regulating processes.
There are mainly two types of level controls:
1. Tight level control: This is where the control requirement is to hold the level as constant as possibleand keep it at setpoint under all conditions of load disturbances. The tuning for this must be as fast as
possible. Therefore one needs to use high controller gains, to allow the valve to respond quickly to changes. (Remember that in general there is a relatively high volume of liquid in the vessel in comparison with the volume of liquid passing through the valve. Therefore if one wants a response to be as fast as possible, you must get the valve to move quickly.)
2. Surge level control: This used where the vessel is designed to store or hold enough of liquid so that
a constant flow of it can be passed to downstream processes, irrespective of changes in flow passing into the vessel. Therefore if we have a valve to control the level on the output side of the vessel, then one must try to minimise movements of this valve. This requires slow tuning or even better to use techniques without an actual controller as described in the first Loop Signature series in Article LS29-1.
The examples being covered in this article are where the control requirement is for the first case above of tight
level control.
Many C&I practitioners seem to have a general fear of using high proportional gains in controllers. This is
obviously due to a fear of causing instability. Most self-regulating processes need relatively low gain in the
controllers. However for the majority of cases for integrating processes, particularly for level controls with
relatively long tank retention times, then much higher gains can be used. As a very broad general rule, one
would probably not need gains higher than 15, and most such levels have gains varying between 3 and 15.
The problem with level controls comes with the integral term in the controller which can cause various
problems that can result in cyclic behaviour of the lop when the controller is in automatic. Typically any valve
hysteresis on integrating processes tuned with both proportional and integral terms will result in continuous
cycling of the loop. Integrating processes generally also need much longer integral times than self-regulating
processes. If the integral is too fast then the loop will become cyclic, and can be in continuous oscillation.
Most people who do tuning have a good understanding of self-regulating processes and can usually achieve
some sort of tuning on them which is stable, although the vast majority of loops are tuned far too slowly.
However when it comes to integrating processes the lack of understanding of the dynamics of these processes result in very bad and often unstable tuning. One petro-chemical refinery where I did some consulting, investigated the performance of the controls of all their integrating processes by examine long term trends. They found that the majority of them were in continuous cycles, with periods of literally hours on long retention time vessels.
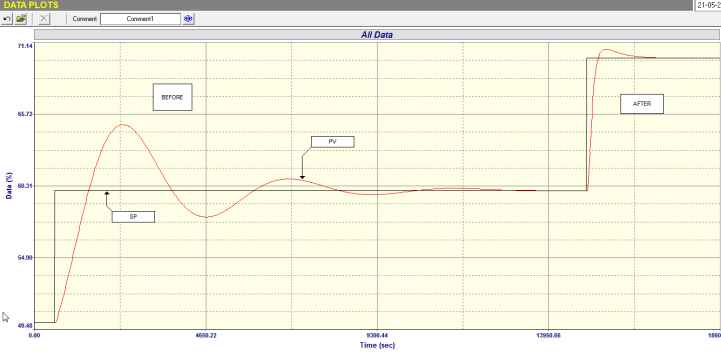
The first example is of a level control which was really incredibly badly tuned. The process had a retention
time of approximately 16 minutes, which is not very large. The original tuning was set with a proportional gain
of 0.8 and an integral of 7 minutes per repeat.
A setpoint step change of 10% was made and a very slow cyclic response resulted.
In Figure 1 it can be seen that with this tuning the process had not settled completely at setpoint after 4 hours!
Medium fast tuning of the Protuner loop analysis software gave a tune with a proportional gain of 9.0 and an
integral of 9 minutes per repeat. The response to the same size of setpoint change gave a reasonable response
with only one overshoot and the process has settled completely at setpoint within 30 minutes.
This is a wonderful example of a typically badly tuned level loop.
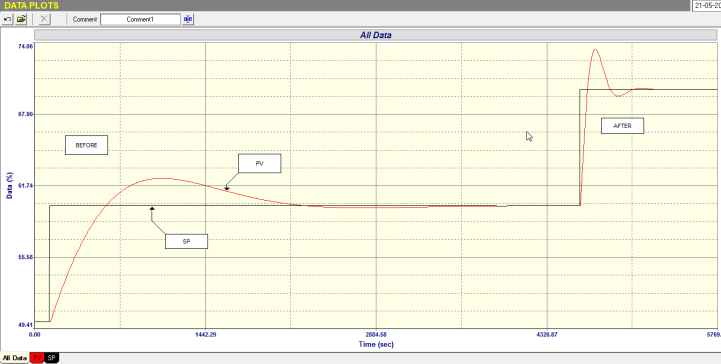
Figure 2 also shows the "before and after" tuning of another level loop. This loop was very difficult to tune
because the process is subject to frequent, large load disturbances, and it was very hard to get quiescent
periods during which open loop tests could be performed to obtain a good and representative process dynamic
signature to allow tuning to be calculated. It took over an hour to run these tests, which could have been
completed within a few minutes if conditions had been stable.