Home About us Contact us Protuner Loop Analyser & Tuner Educational PDFs Loop Signatures Case Histories
Michael Brown Control Engineering CC
Practical Process Control Training & Loop Optimisation
CONTROL LOOP CASE HISTORY 157
POSITIVE LEAD INTEGRATOR TUNING “PARTY TRICK”
Control loop optimisation has always fascinated me. In most cases when I am called into a plant to sort out a problem it is something that they have been trying to fix for a long time without success. Therefore these problems are usually very challenging. Many years ago the Chief Control Engineer at a large plant in South Africa said he thought I must be completely crazy doing this kind of work. He said that in his opinion, clever people in most plants who know their processes backwards would have been trying to solve their problems for quite a while, and how could I go into these plants with no prior plant knowledge and try and fix the problem in a short time?
He certainly has a point. You have to go into the plant and try and analyse the problem, which usually involves having to learn all aspects about the control, ranging from learning the process, the control strategy, through to trouble shooting all the components in the control loop. It certainly makes life extremely interesting.
I am frequently asked as to what my success ratio is. Generally I would say that I can solve problems in the vast majority of cases, and find solutions to them. However due to the nature of working plants, the solutions often cannot be implemented immediately. For example sometimes it can’t be fixed until the next shut-down, or in the case of valves (which generally are the cause of most control problems) it has to wait until the valve can be serviced or replaced. Also in most plants instrument maintenance personnel have to be scheduled to work on the offending equipment at a later date. Problems that require changes in programming in the control equipment, such as modifying the control strategy, or reprogramming a controller can also not usually be immediately performed until permission has been obtained from higher authorities, which often involves all sorts of meetings, safety evaluations, etc.
Unfortunately one cannot always be successful. For example there are occasionally cases where analysis cannot be performed due to loop instability of one sort or another. It is generally vital to get steady state conditions to do analysis and tuning. Some processes seem to be impossible to achieve such conditions and are always changing. There have been occasions where we literally have spent days on trying to stabilise a particular process without success. Generally in the end with these processes it is back to “trial and error” tuning which is very unsatisfying.
Then there are also processes that cannot be controlled with conventional feedback control systems, and possibly even not by any other more advanced control systems.
On very rare occasions one also encounters process phenomena for which no logical explanation appears to exist. Things happen in a process for which no one can give a rational explanation. At times these things seem to defy the laws of physics. I have attended many discussions with plant control and process experts trying to find out why these things are happening. Obviously it is generally impossible to fix something that cannot be understood.
The interesting thing is that the plant operators even in the face of apparently insurmountable control problems, still manage to run the plant and make product. I have talked about process operators before and have mentioned that even though the majority in most plants are not highly qualified people, they still develop empirical skills by long experience on running the plant. I do believe that the performance of operators are often not recognised properly and not given sufficient credit by senior production staff and management for their performances.
However fortunately as mentioned above, the vast majority of problems I investigate are fixable, and it gives you a feeling of tremendous satisfaction when a problem is solved and the loop is working nicely. This is why I have persevered in this job for many years.
When it comes to tuning there is one type of process which if tuned correctly gives one the most satisfaction. This is the “positive lead integrator”, which is a process with dynamics very few C&I practitioners understand. I have written about this quite a few times in the past, but I always think it worthwhile giving examples of these when one encounters them. They are normally tuned very badly and extremely slowly, and if one understands the dynamics, they can then be normally tuned very much faster and more robustly.
The example of this one was recently encountered when optimising a drum pressure in a petro-chemical refinery. The operators were complaining that firstly when there was a load change the process never got back to setpoint, and they had to always get it there in manual. Secondly they said that the control itself was very slow to respond to changes.
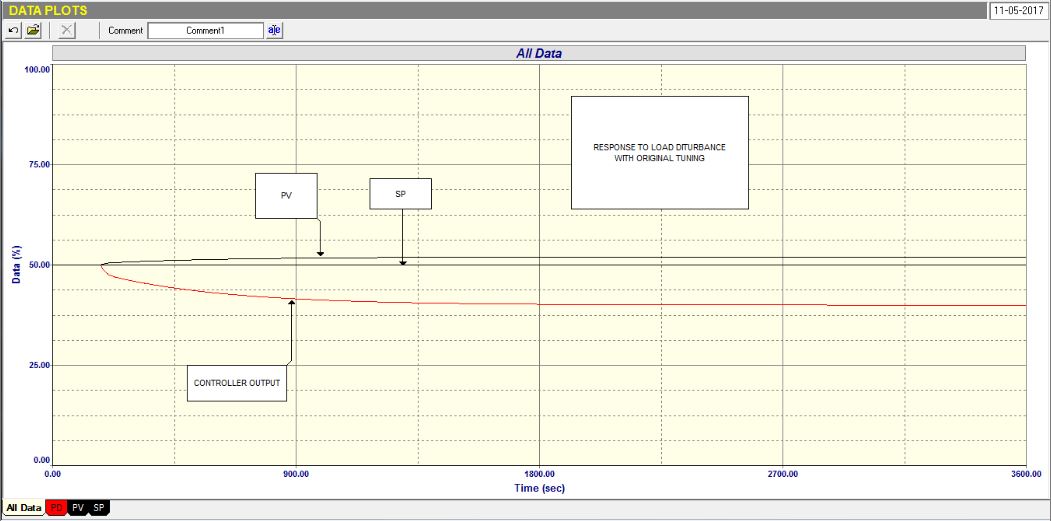
Figure 1
Figure 1 shows the response of the process to a load change with the “as-found” tuning, which was P = 5 (gain), and I = 0 repeats/minute. (Please note that the closed loop tests illustrated here are done by accurate simulation using the process dynamics captured by the Protuner. This is because it is very much easier to simulate a load change than to make one on the actual process, and which also normally upsets production. It is also easier to see the resultant test.)
One can see a big problem in the figure is that the PV did not ever get back to setpoint. The reason for this is because the tuning was for a proportional only controller with no integral. With a proportional gain of 5 and no integral, there is a possibility that offsets of as large as 20% could be encountered! Integral is the term in the control that is there to get rid of offset.
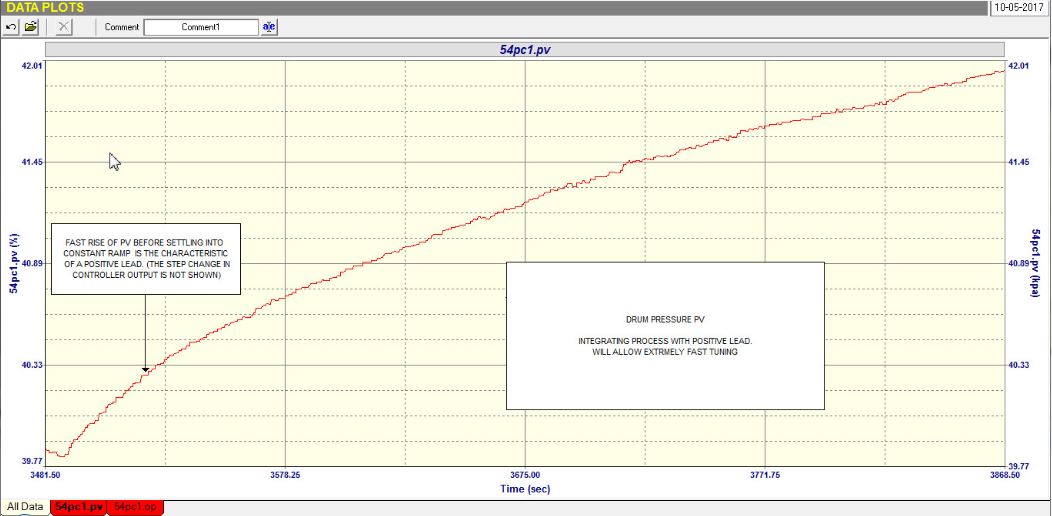
Figure 2
Figure 2 is the actual open loop test and shows the PV response when subjected to a step change in the controller output with the controller in manual. (It is important that when one is performing the test that you initially get the process to steady out.) As can be seen in the test the process is very much an integrator. These always require one to get the process into balance to reach steady state which can only occur when the input and the output of the process are equal. (Known as a balanced process).
The significant thing in this particular process is that instead of the PV going into a constant ramp immediately after the step change on controller output was made, as one sees on level controls, there is an initial fast rise in the PV. This can be clearly seen in the figure. What is actually happening here is that the process initially acts as a self regulating process which occurs as the input to the process is initially changed. However as the pressure in the drum increases the vapours start compressing and this acts in an integrating fashion.
We refer to this type of dynamics as “a positive lead integrator”.
The correct way to tune such processes which have a significant lead, is to tune on the self-regulating part of the process, and not on the integrating part. This usually results in a very much faster tune, which in turn allows the controller to deal with the change immediately on the self-regulating bit, before it starts integrating.
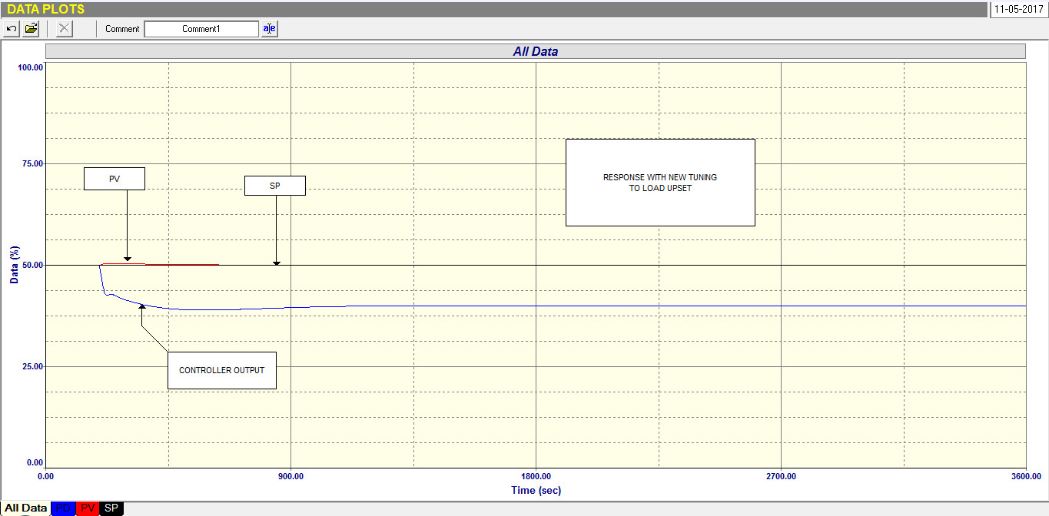
Figure 3
In this case the Protuner gave a tuning of P = 8 (gain), and I = 18 repeats/minute. Figure 3 shows a final test with the new values. Comparing this with the original closed loop test shows just how remarkably well this new tuning works. Almost magically.
I often refer to this tuning as a “party trick”. Usually using it gives dramatic results compared with the original tunings, as very few people seem to be aware of how to deal with a positive lead integrator, and tend to tune them very slowly as they can be very unstable if tuned incorrectly. On one auspicious occasion when tuning dryer steam pressure on a paper machine, we improved the speed of response by some 2,000 times, which equated in considerable productivity improvement on the paper machine.