Home About us Contact us Protuner Loop Analyser & Tuner Educational PDFs Loop Signatures Case Histories
Michael Brown Control Engineering CC
Practical Process Control Training & Loop Optimisation
LOOP SIGNATURE 23
TUNING - PART 1
This is the first of several articles dealing with the subject of tuning, which forms an important part of this loop signature series.
As mentioned several times in my earlier articles I have found that many people think that optimisation consists solely of tuning. I would stress once again that tuning is the last thing one should do when optimising regulatory controls. Before even thinking of tuning one should firstly have a good understanding of the process, of what the control is there for, and what can affect the loop. Secondly the loop should be fully analysed, any problems sorted out, and of course all of the other things should have been done that have been fairly exhaustively covered previously in this series. One should also have a very good understanding of the process dynamics prior to performing tuning. I will return to this point in a later article.
At the outset I would stress that if you wish to perform tuning successfully, you do need a proper tuning package that can perform its task on any type of process dynamic. To do this it must be based on the full mathematical theory of feedback control. I have tested many different types of tuning packets and systems. Unfortunately the vast majority do not use the full theory, and are based on simplifications. They may work on some of the simpler dynamics, but are useless when dynamics of a more complex type are encountered.
I originally did not cover tuning when I first started presenting practical control courses, as I felt that any simplistic method of tuning was a complete waste of time. This led to much criticism, and I then added a section on a few simplistic tuning methods. What I learnt from this was that even though the simplistic methods are not very effective, it did in fact lead people to gain a better understanding of control, and in particular the section on tuning simple integrating loops is extremely valuable.
How is tuning done in the real world?
Figure 1
Figure 2
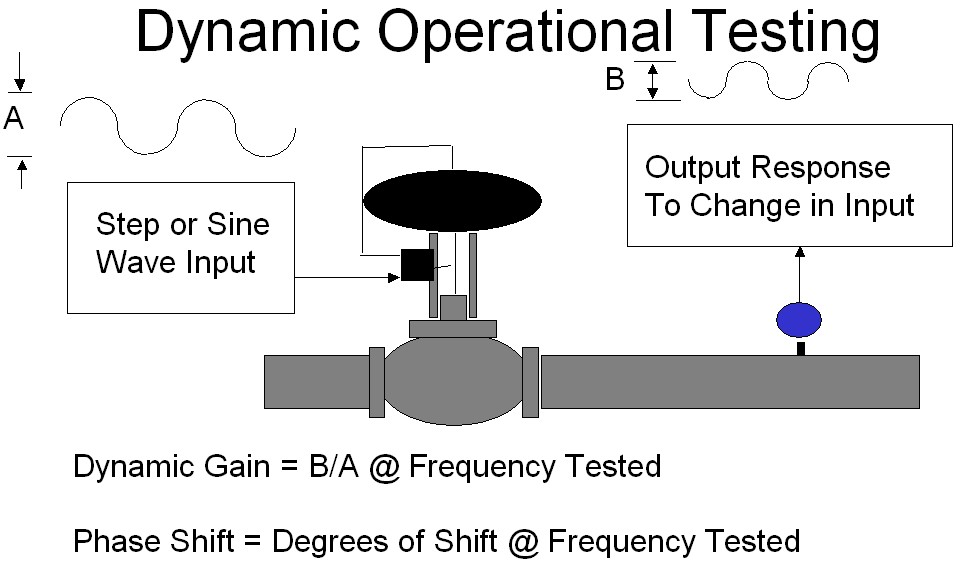
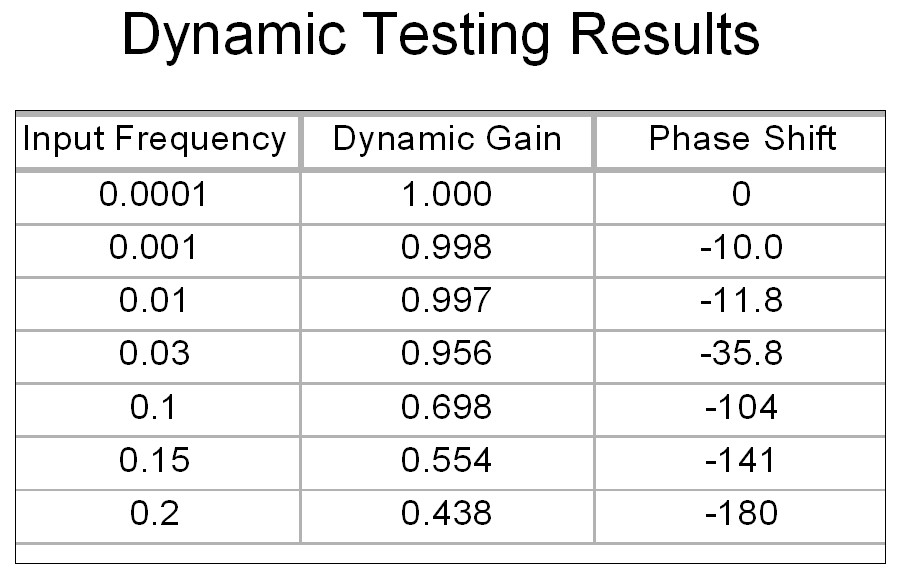
Ideally following the original ideas postulated by the early mathematicians who developed the theory, e.g. Nicholls, one should perform a full frequency response test on a control loop. As illustrated in Figure 1, a sine wave is generated onto the input to the process (process demand). Initially the sine wave must be at a very low frequency. A sine wave of the same frequency will appear at the output of the loop (process variable). The amplitudes of the input and output sine waves are measured and their ratio calculated. This is called dynamic gain. The phase difference is also measured. The test would then be repeated at a slightly higher frequency. This procedure is then repeated with higher and higher frequencies until the output lags the input by a phase difference of 180°. At this point the contribution fed back to the process from the feedback starts pushing the valve in the wrong direction, and instability results. The table shown in Figure 2 is an example of such a test.
Figure 3
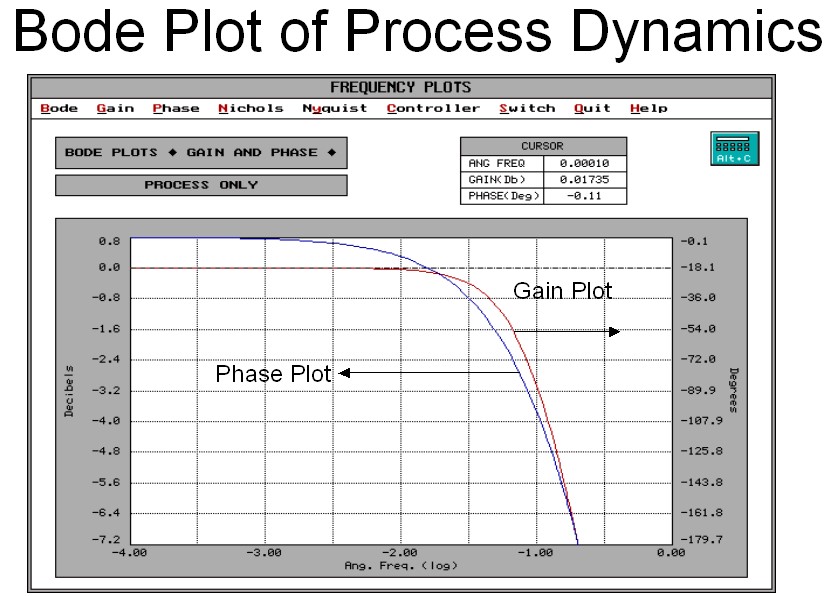
The next step in the tuning procedure is to draw a frequency plot from the test data. The various mathematicians all came up with slightly different plots. I have found that control academics seem to have strong feelings and argue a lot about which is the best. However, in reality they all really contain much the same information. A Bode open loop plot is shown in Figure 3. Bode plotted two graphs, firstly dynamic gain versus frequency, and secondly phase lag versus frequency.
To obtain so-called optimum tuning one manipulates the shape of the plots. This will be discussed later in this series.
Unfortunately this methodology for tuning cannot be used in real life. Firstly one would not be very popular with process people in most plant if you were to start cycling their loops. It could also be dangerous in many instances. Secondly it would take far too long. I once met a person who did perform a full frequency response on a flow loop in a test rig, as part of his M.Sc. thesis. It took him several days. Now flows are fast processes with dead times and time constants in the region of a second or two. This would mean that using this method to tune slow processes which can have time constants often in the region of many minutes, could literally take months or even years.
Possible methods of tuning are:
1. Full frequency response as described above.
2. Trial and error, or "twiddling the knobs". Sometimes referred to as "WAG" (Wild Ass Guess).
3. Model based approximate methods like Ziegler Nichols, Cohen Coen, and Lambda. Sometimes referred to as "SWAG" (Scientific Wild Ass Guess).
4. Self-tuning controllers.
5. Model based tuning "packets".
6. Time response to frequency response conversion software tuning packets.
Note: A "model based" method is where one tries to build up a mathematical transfer function of the process, usually by introducing a step on the input to the process. Typical dynamics in such a model would be things like process gain, dead time, first and higher order time constants, if self-regulating or integrating, and positive and negative leads. Using such a model would allow one to predict how the process output would react to any change in the input.
Which methods do practitioners in real life plants use? An American control-engineering journalist who investigated tuning methods used in over 130 plants in northern America gave the answer to this a few years ago. He said that 98% of all tuning was done in these plants by either the WAG or SWAG methods mentioned above.
There are several reasons for this. Firstly most people having very little understanding of the practicalities of control often think that the answer to all problems is to tune the loop. As stressed earlier, tuning is normally the last thing one should do in the optimisation process. Even the world's greatest tuning system will not work right unless one understands what one is doing, and also uses it correctly. Generally even using a good tuning package haphazardly will probably only produce good results about 30 - 50% of the time.
Secondly, most of the tuning methods listed above do not work on all process dynamics, and some have so many simplifications that they hardly ever work at all, even on the most simple of processes. I have personally tested many of the available methods and systems, and the only one that I have found that works on every process type, (provided it is used correctly), is a particular make that employs the time to frequency response conversion technique listed in Item 6 above. In addition to using all the mathematical theory behind tuning, the package also incorporates a "tree of knowledge", or intelligent rules, that give better and safer tuning on different types of process dynamics.
Therefore people who try tuning packets or methods find that they don't seem to work most of the time, and get impatient, and go back to twiddling the knobs.
How good are people at tuning using WAG? In my experience very, very few have any real idea. The occasional person sometimes develops great skill on simpler processes. I have tried to find out how they do it. In general it appears they have developed a feel for it (rather like the "perfect pitch" of an experienced piano tuner), but they normally cannot explain how they do it. Again they are usually not very successful at tuning processes with complex dynamics. Also as a general rule, most people have better "luck" in tuning self-regulating processes than integrating processes. This is because very few people recognise and understand the mechanics of integrating processes, which differ completely from self-regulating processes.
The next article in this series will deal with tuning simple self-regulating processes using a few SWAG methods.