Home About us Contact us Protuner Loop Analyser & Tuner Educational PDFs Loop Signatures Case Histories
Michael Brown Control Engineering CC
Practical Process Control Training & Loop Optimisation
LOOP SIGNATURE 26
TUNING - PART 4
TRYING TO MAKE SOME SENSE OF TUNING SELF-REGULATING PROCESSES
In the previous two Loop Signature articles several SWAG (scientific wild ass guess) methods of tuning self regulating processes were given, and a very simple first order lag deadtime process was tuned by those methods, and also by a couple of other methods including the Protuner, and the various responses to setpoint changes were shown.
It was concluded that the reason that the SWAG tunings were all so different was because they are SWAG, and no such approximate method can ever give a really scientifically valid tune, as the Protuner did.
Unfortunately many plants have not invested in proper loop analytical and tuning equipment like the Protuner, and it is often extremely difficult to persuade the Managements to commit to optimisation, as this means investment in time, people, equipment, all of which costs money. As mentioned in many of my articles in the Case History series, plants having spent millions on a control system, are often not prepared to invest a relatively small amount more to get their system working properly, and in fact in most cases have little idea how badly their investment in control is performing.
As a result of this about 90% of all tuning performed work wide is done by WAG (wild ass guess) or “playing with the knobs”. Another 8% of people try SWAG methods, and the last 2% use truly scientific methods like the Protuner.
The purpose of this particular article is to try and give those unfortunate enough to have to use WAG or SWAG tuning a little idea of how to go about it, and even more importantly some understanding of a couple of basic principles. Unfortunately the methods discussed here will only work with really simple dynamics like a first order lag deadtime self-regulating process. I cannot offer any advice as to how to tune processes with more complex dynamic without using the right equipment.
It is firstly necessary to know a little behind the theory of tuning to understand how closed loop control works.
When you put a controller into automatic you are actually performing a multiplication. Mathematically the process and controller transfer functions are multiplied together. The best tuning, known as pole cancellation tuning, results in a combined transfer function, which is a perfect integrator.
•C(s) x P(s) = Ke-DTs/s
(This, out of interest, is exactly the same transfer function as an open loop level process).
Pole cancellation tuning has major advantages, one of which is that it gives the lowest controller gain with the fastest integral, thus minimising valve wear, and allowing fastest response to load changes.
It was shown in Loop Signature 23, how a frequency plot was obtained by dynamic frequency testing (applying a sine wave generator onto the process input or valve, and measuring the dynamic gain and phase shift at increasing frequencies until the PV lags the PD by 180°). The results can then be plotted on a frequency response graph, one of the most popular being the Bode plot, which was also shown in Loop Signature 23.
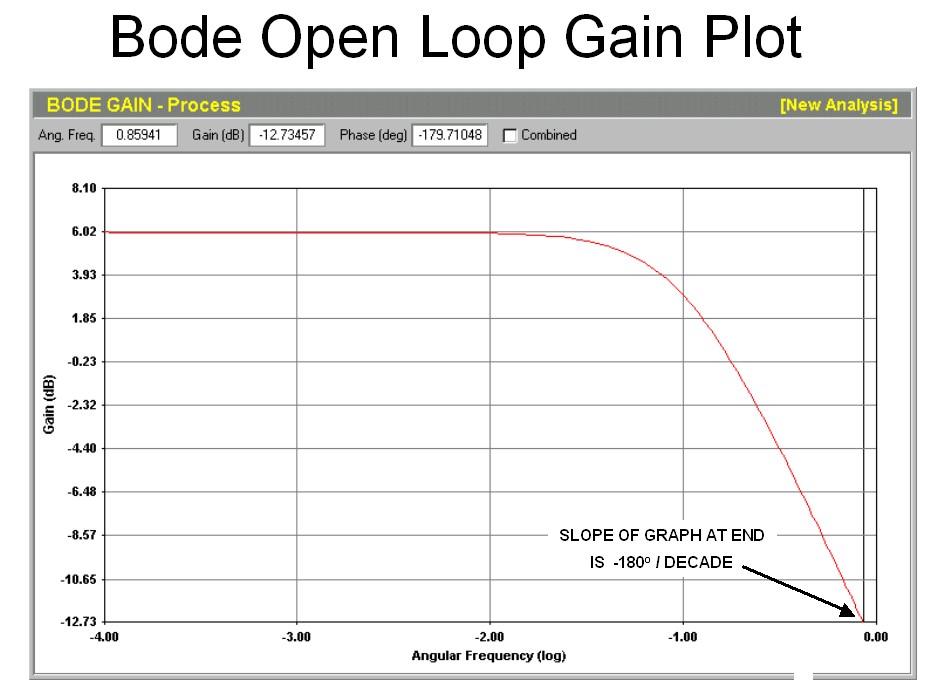
The Bode Gain plot of our simple first order lag, self-regulating process is a graph starting off horizontally, and then dropping off to end at the point the phase lag reaches -180°. An important point is that the slope of the Gain Plot at this point is –20d.b./decade. (Refer Figure 1).
Figure 1
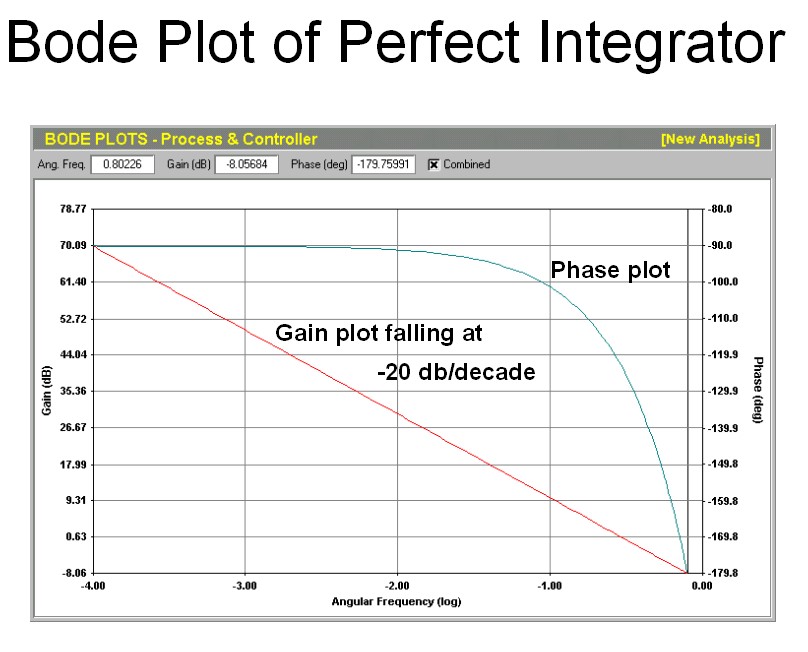
The Bode gain plot of a perfect integrator is shown in Figure 2. The gain plot is a perfectly straight line sloping downwards at exactly–20d.b./decade. This is the shape to which we must convert our simple first order lag, self-regulating process, open loop plot, when it is multiplied by the controller’s transfer function.
Figure 2
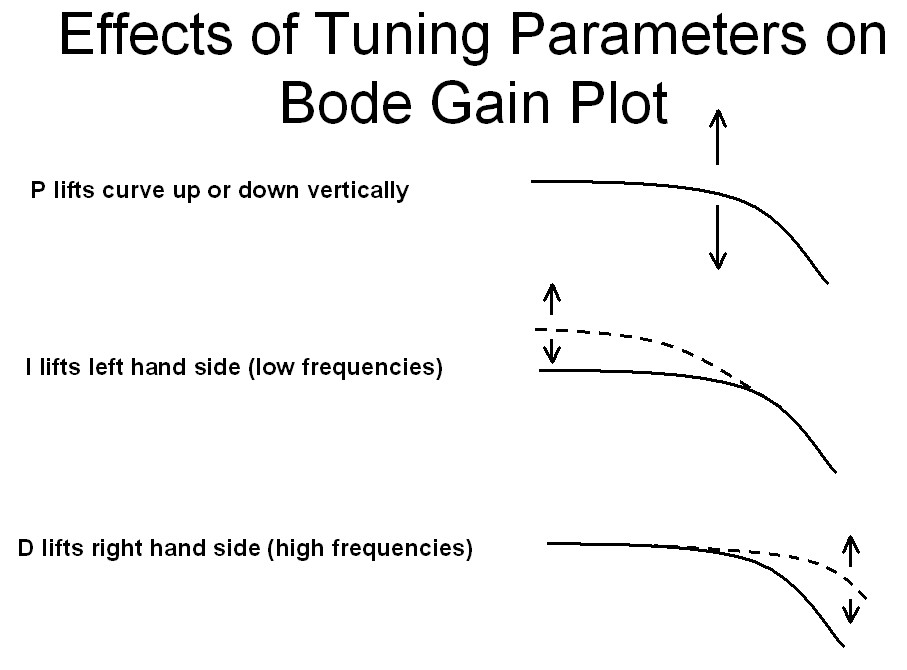
Now in the controller we have only three terms to help achieve this. These are the P, the I, and the D terms. Figure 3 shows the individual effect of each of these terms on the plot.
Figure 3
The P term has no effect on the shape of the plot. However it does effect its position in relation to the Y axis (dynamic gain).
The I term effects the lower frequencies section of the plot most. It tends to lift up the left hand side.
The D term has more effect on the higher frequencies section of the plot. It tends to lift up the right hand side.
Now the open loop plot of our process already ends off at the right slope, so we can immediately see that we should never use the D term on such a process, as it will “mess-up” our pole cancellation. Therefore we are left to control this process with just the P and the I terms. As the P does nothing to the shape, it becomes obvious that the I term must do the work of straightening first, and then the P term will be used to set the response we require for the control.
Now a very interesting thing should be noted. If you refer to the last Loop Signature (No. 25) where we actually tuned a simple process like this, you will see that the actual model we used had a time constant of 30 seconds. Then in the tuning table you will see that Lambda tune gave an I value of 30.8 seconds/repeat, and both the IMC and Protuner gave an I value of 30.0 seconds/repeat.
It can be mathematically proved that if you set the I term equal to the time constant of a simple first order self-regulating process, you cancel out the poles and get the perfectly straight line integrator closed loop Bode plot we desire. (This proof will in fact be shown in a much later article when the subject of process dynamics will be covered in detail).
Thus the most important point of this article is that as far as self regulating processes are concerned, once you get the combined plot straightened out as described, then you never need to again play with the I term (and in fact also the D term if you did have to use it on more complex process dynamics).
Therefore if I was unfortunate enough to have to ever tune a simple self-regulating process of this kind without a proper tuning package, I would use the following SWAG method:
1. After ensuring that all the problems like valve hysteresis, non-linearity, etc. were sorted out first, I would first do an open loop step test on the process to allow me to graphically determine the basic dynamics, in particular the time constant (TC), and the dead-time (DT). (All of these things were detailed in previous Loop Signature articles).
2. If the DT<TC I would set the I term equal to the TC.
3. If the DT>TC I would set the I term equal to the TC + Total loop DT/4. (Total loop deadtime is the sum of the process deadtime and the controller scan rate).
4. I would adjust P by trial and error to give me the response I may desire for that particular process. At any stage in the future if I was not happy with that response all I would have to do is play with the P term again. Provided the process dynamics had not changed I would never need to adjust the I again.
This is very different from the way most people try and tune these types of processes with WAG. They generally always play with P first and then try and adjust I. It’s much harder to do it that way.